Дизайн устройства показан на рис. 11.1, а вариант в сборке — на рис. 11.2.
Для паяльника обязательно необходим держатель, поэтому корпус выполняет две функции: управления и подставки для нагретого элемента. Представленный дизайн был создан иностранными и отечественными конструкторами, исходя из соображений эргономики и практичности. Автор добавил к дизайну подсвечивающийся дисплей и аналоговый регулятор мощности.
Одна ИЗ идей создания уст- Рис. 11.1. Дизайн устройства цифрового
РОЙСТВЗ заключается В формиро- управления паяльником
вании подсоса воздуха внутрь корпуса и фильтрации через воздушный фильтр (0,5 мкм), когда пары свинца и канифоли остаются внутри корпуса на фильтре. По мере эксплуатации фильтр, который крепится напротив отверстий в корпусе, перед вентилятором, заменяется. Для подсоса используется вентилятор, применяемый для обдува процессоров компьютеров. Поток отфильтрованного воздуха направляется на силовой трансформатор, тем самым охлаждая силовой элемент схемы.
Управления устройством основано на микроконтроллере AT mega 8, предоставляющий память программ на 8 Кбайт, 130 команд управления и вычисления, 23 линии ввода-вывода, два восьмиразрядных таймера,
284
Глава 11
один 16-разрядный таймер, шесть 10-разрядных АЦП [8], а также интерфейсы SPI, TWI и USART.

Рис. 11.2. Устройство цифрового управления паяльником в сборке
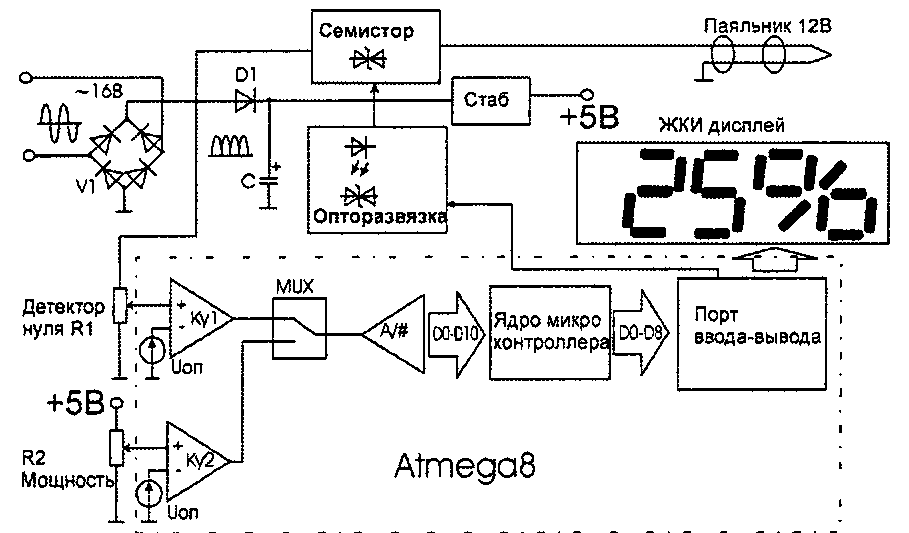
Структурная схема устройства повторяет классические аналоговые схемы (рис. 11.3).
Рис. 11.3. Структурная схема устройства цифрового управления паяльником
Сетевое напряжение через трансформатор поступает на выпрямительный мост VI, который из переменного напряжения 16 В, 50 Гц
Цифровое управление паяльником
285
формирует постоянное импульсное напряжение 16 В, 100 Гц. В импульсной форме напряжения присутствует переход через ноль, для фиксации которого служит детектор нуля R1 и операционный усилитель Kyi. Импульсное напряжение через D1 поступает на сглаживающий конденсатор С, а сглаженное нестабилизированное напряжение — на стабилизатор.
После стабилизатора получаем питающее напряжение управления +5 В, которое использует на регуляторе мощности R2 операционный усилитель Ку2. Вращая движок переменного резистора R2, задаем разный уровень напряжения на входе Ку2. В дальнейшем при составлении программы необходимо учитывать нелинейную характеристику переменного резистора R2, чтобы мощность регулировалась через равные сегменты поворота движка регулятора мощности.
На вход Kyi и Ку2 также подается опорное напряжение. Изменяя ее при конфигурировании АЦП в микроконтроллере, можно изменять мак- ■ симальный уровень входного аналогового сигнала. Микроконтроллер оснащен аналоговым мультиплексором, который позволяет выбрать аналоговый канал. В начале программы выбирается канал мощности, а затем в режиме реального времени — канал детектора нуля.
После преобразования аналогового сигнала в цифровой микроконтроллер выводит на дисплей заданную мощность и управляет семисто-ром через гальваническую опторазвязку для защиты от сетевых всплесков.
| НА ГЛАВНУЮ | | ЧТО ТАКОЕ PIC ? | | ПРОГРАММАТОР | | ПРОЕКТЫ | | СТАТЬИ | | ССЫЛКИ | | КАРТА САЙТА |