sy
ml.
00000000
NBZOf +
pm □ '0 0 0 0 0 0 0 0
vv-yo
гэ
row
"Л^З? ОШО
93
го D V) ■ (л
гал
11Ш
О О
> + < ООО
_и
о _ ы ф
О О
OOOI
т°
01 BBBLfJ
Радиоуправление моделями автомобилей 255
00 о о - ° 0 0 0 °
ООО О
. О О
о о° V о о °
О О 0 0 о°о
О О
01 ^
в о
°° ° о о о оо о i о ч о9
""^ 000000
Q 0 б 0 О О
о о
о о г.
о о
00 0 0 о\ ° °
О
о
о
Рис. 10.6. Продолжение
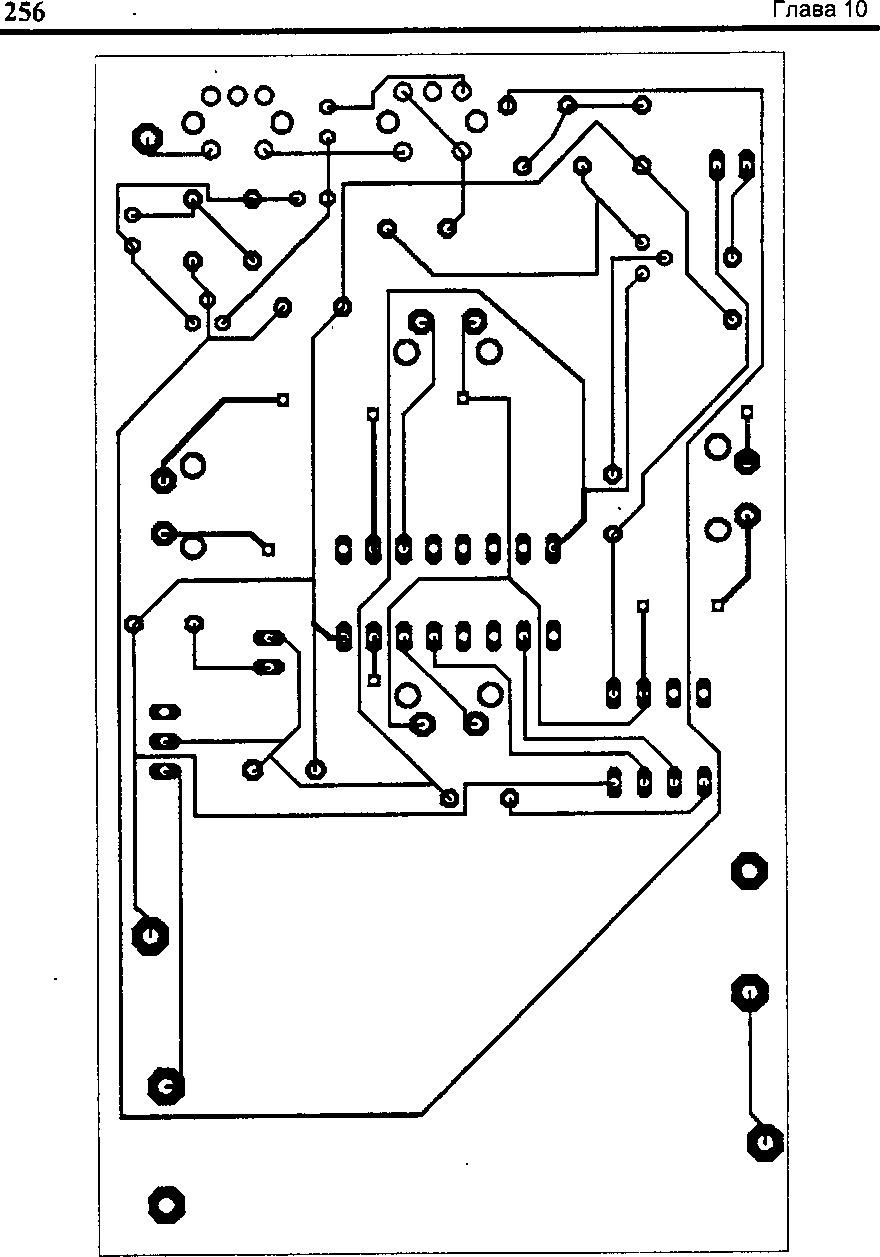
Рис. 10.6. Окончание
Радиоуправление моделями автомобилей
257
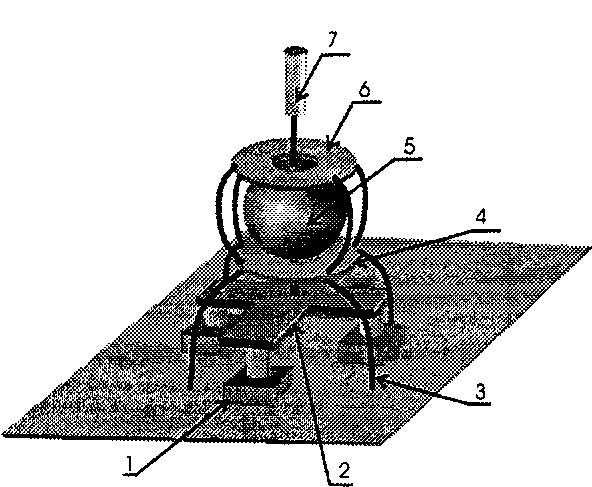
Рис. 10.7. Джойстик
Передающий тракт передатчика следует проверить на самовозбуждение при подаче питания на транзистор VT1. При этом сток Q1 можно отпаять и соединить дорожки печатной платы стока и истока Q1 (после проверки и настройки необходимо проделать обратную операцию). Передатчик можно также проверить во время свечения светодиода при нажатии на любую клавишу управления.
Частота передачи (27 МГц) регулируется путем растягивания или прижатия друг к другу витков L2 и L3. Паразитные боковые колебания фильтруются настройкой сердечника L1 (емкость антенны). Убедившись в полной работоспособности и настройке передатчика, на плату устанавливают экран из фольги над элементами передатчика.
Приемник
Питание на приемник подается от трех аккумуляторов Gl, G2, G3 через S1. Приемник радиоуправляемой модели собран на Q1 по схеме, показанной на рис. 10.8 [31].
После детектирования D1 и сглаживания С6 частота 3 кГц фильтруется входным фильтром L3, С8. Конденсатор С9 выделяет переменную составляющую полезного сигнала, который усиливается операционным усилителем ЮЗА (коэффициент усиления ограничен для нормирования АЧХ на заданном уровне). Одним из недостатков схемы является отсутствие контура автоматической регулировки усиления.

Рис. 10.8. Принципиальная схема приемника
Радиоуправление моделями автомобилей
259
Сигнал поступает на компаратор IC3B, который выделяет основную амплитуду из всего шума тракта AM, поскольку шум имеет низкий уровень по отношению к полезному сигналу. Во входном спектре полученной информации присутствуют только помехи, наводки от других станций или источников электромагнитного излучения.
Отфильтрованный и выделенный сигнал поступает на вход порта В микроконтроллера (вывод РВ2). Микроконтроллер постоянно сканирует вывод РВ2 (режим низкого энергопотребления в конструкции не используется). Как только передатчик выдал код сигнала, а приемник принял и обработал его, микроконтроллер переходит в программу дополнительной обработки сигнала для подачи достоверной команды на исполнительные устройства.
Исполнительные устройства построены на основе драйверов коллекторных двигателей [33]. Автор выбрал драйвер LB1642 производства Sanyo (рис. 10.9), поскольку он хорошо работает в диапазоне напряжений 4.. 16 В и коммутирует двигатели мощностью до 1 Вт, что вполне достаточно для небольшой радиоуправляемой модели.
| НА ГЛАВНУЮ | | ЧТО ТАКОЕ PIC ? | | ПРОГРАММАТОР | | ПРОЕКТЫ | | СТАТЬИ | | ССЫЛКИ | | КАРТА САЙТА |