• светодиоды — на 3 мА;
• шаговые двигатели — от дисководов.
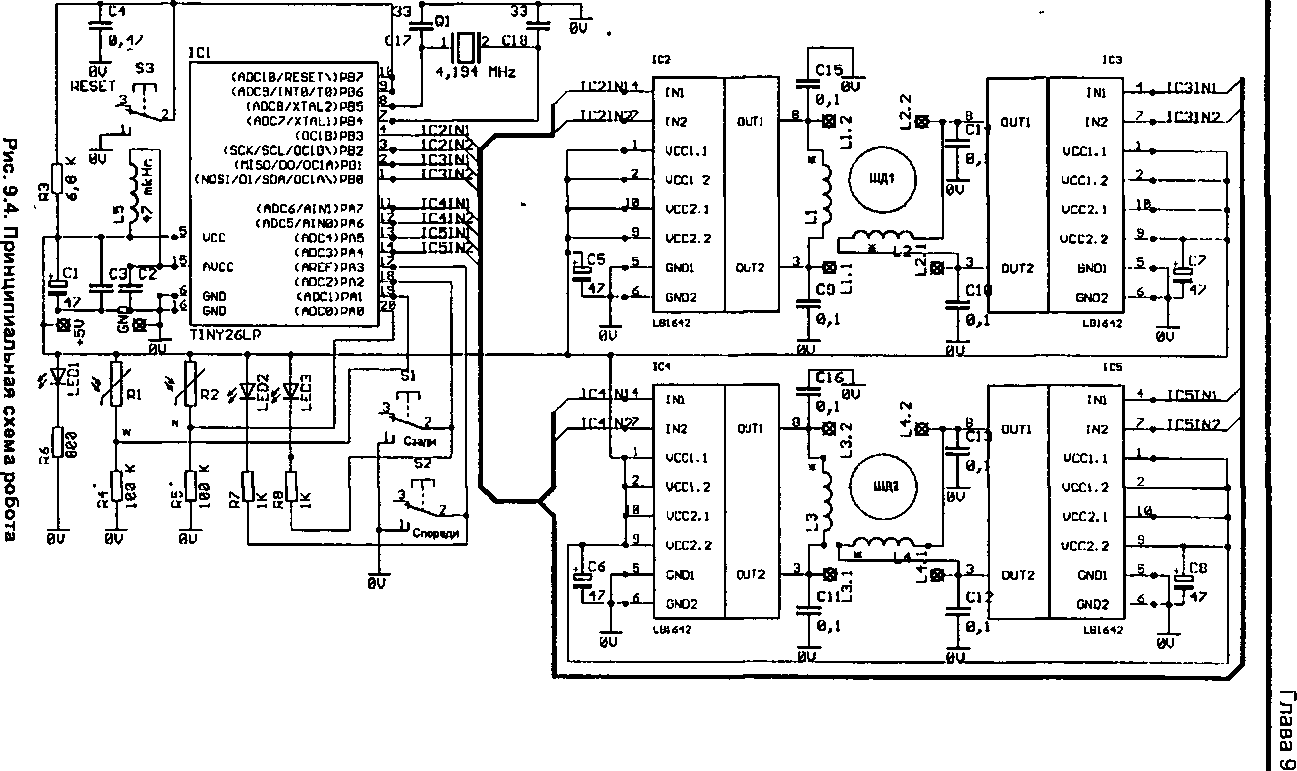
Всей конструкцией РОС управляет микроконтроллера tiny26 (1С 1). Питание от аккумуляторной батареи подается на плату (выводы +5 В и GND). Питание — нестабилизированное (напряжение — от 4 до 5,5 В).
Робот "Охотник за светом"
213
Минимальное напряжение, при котором нормально работает выходной каскад на основе LB1642, составляет 4,0 В [30]. Максимальное напряжение питания микроконтроллера tiny26 — 5,5 В.
Поскольку выключатель питания должен обеспечивать ток потребления около 1 А, его габариты и вес значительно влияют на полноценную работу конструкции РОС. По этой причине выключатель питания в схеме не используется. Но здесь возникает проблема: РОС начинает автоматически работать при подаче напряжения. Для ее решения функцию отключения питания выполняет двухпозиционная кнопка "RESET". При коммутации кнопки S3 на "землю" микроконтроллер окажется в состоянии режима "Сброс", пока на выводе 10 будет низкий логический уровень. О наличии питания платы управления свидетельствует засветка светодиода LED1. Для активизации РОС достаточно выйти из режима "Сброс", разомкнув связь кнопки S3 с "землей".
С выводом 10 микроконтроллера соединен вывод 9 микроконтроллера, на который программа коммутирует АЦП. В случае низкого напряжения питания РОС остановится. Возникает вопрос:'"Каким образом АЦП микроконтроллера tiny26 определит, что напряжение питания упало?". В момент коммутации обмоток ШД произойдет падение напряжения аккумулятора. Конденсатор С2 не успеет разрядиться через L5, а схема АЦП питается от танталового конденсатора С2 емкостью 1 ООО мкФ, что даст разницу в считываемых данных АЦП. Тем самым мы косвенно измеряем ток разряда аккумулятора. Эта зависимость позволяет в динамическом режиме проверить состояние аккумулятора и заблаговременно сделать перерыв для восстановления его емкости.
В качестве информации о состоянии РОС светятся два светодиода: LED2 и LED3. Это означает, что питание присутствует, однако напряжение — недостаточное для работы РОС, и необходима подзарядка.
Работу микроконтроллера tiny26 тактирует кварцевый резонатор Q1 номиналом 4,194 МГц. В таком режиме микроконтроллер работает более устойчиво.
Аналоговый сигнал об освещенности пути снимается с фотодатчиков R1 и R2. Они включены по схеме делителей напряжения, соответственно: Rl, R4 и R2, R5 (R4, R5 — подстроечные). На средней точке делителей АЦП микроконтроллера замеряет уровень напряжения. Далее выполняется программа.
Работа программы также зависит от состояния контактов S1 и S2. В случае их замыкания РОС изменяет направление движения. При этом замыкание контактов сигнализирует один из светодиодов: LED2 или LED3. Если батарея питания разрядилась, то засветятся оба светодиода.
| НА ГЛАВНУЮ | | ЧТО ТАКОЕ PIC ? | | ПРОГРАММАТОР | | ПРОЕКТЫ | | СТАТЬИ | | ССЫЛКИ | | КАРТА САЙТА |