Глава 8
и проклеиваются внутри в местах стыка эпоксидным двухкомпонент-ным клеем "Момент".
В качестве ролика регулировки уровня автор использовал шестеренку от нерабочей игрушки. Из-за низкой высоты кнопки питания были склеены и установлены на выключатель два одинаковых колпачка. Таким образом, был быстро изготовлен несложный и прочный корпус генератора, габаритами 102x58x22 мм.
Настройка и эксплуатация прибора
Схему настраивают при подаче питания без микросхем IC1 и IC3. До включения питания резистор R7 регулируется так, чтобы сопротивление между "землей" и выводом 7 микросхемы ЮЗА составляло 50 кОм. После программирования микроконтроллера все микросхемы устанавливаются на плату и включается питание. Периодичность передачи данных можно наблюдать с помощью осциллографа на выводах 6 и 7 микроконтроллера. Необходимый уровень сигнала задает резистор R7.
Эксплуатация прибора не представляет проблем. После включения питания засвечивается светодиод. Схема начинает работать автоматически на генерацию выбранной частоты сигнала (см. рис. 8.8). В случае срыва генерации необходимо нажать кнопку "Сброс". Если прибор формирует нестабильный сигнал, то необходимо заменить батареи питания. Генерируемый сигнал можно подать с помощью выносных проводов в любую испытываемую схему, однако эти провода нельзя замыкать или подключать к высоковольтным элементам схем.
Себестоимость устройства составляет около 15 евро с учетом покупки нерабочего дисковода.
_Глава 9_
Робот "Охотник $а светом"
Точность, дискретность, отсутствие инерции, несложное управление — это то что требуется для роботизированной модели. Современные недорогие микроконтроллеры позволяют эффективно управлять исполнительными узлами и механизмами. Например, создадим робота "Охотник за светом" (сокращенно — РОС) [26, 27]. Наглядный пример реализации зарубежными радиолюбителями устройства на колесах представлен на рис. 9.1 [28], а видеодемонстрацию шагающего робота можно найти на прилагаемом к книге компакт-диске в папке Видео (файлы Робот! . wmv и Робот2 . wmv).
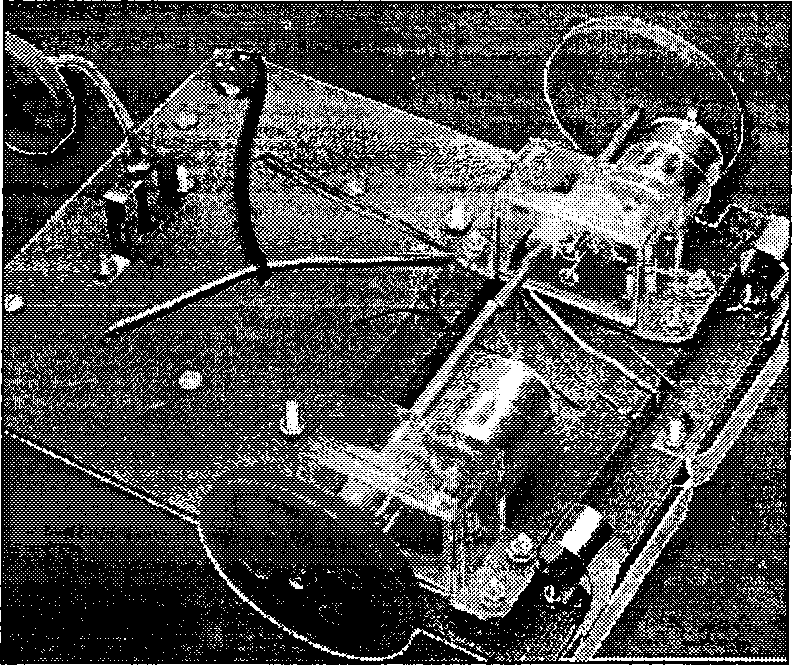
Рис. 9.1. Пример робота на колесах (начало)
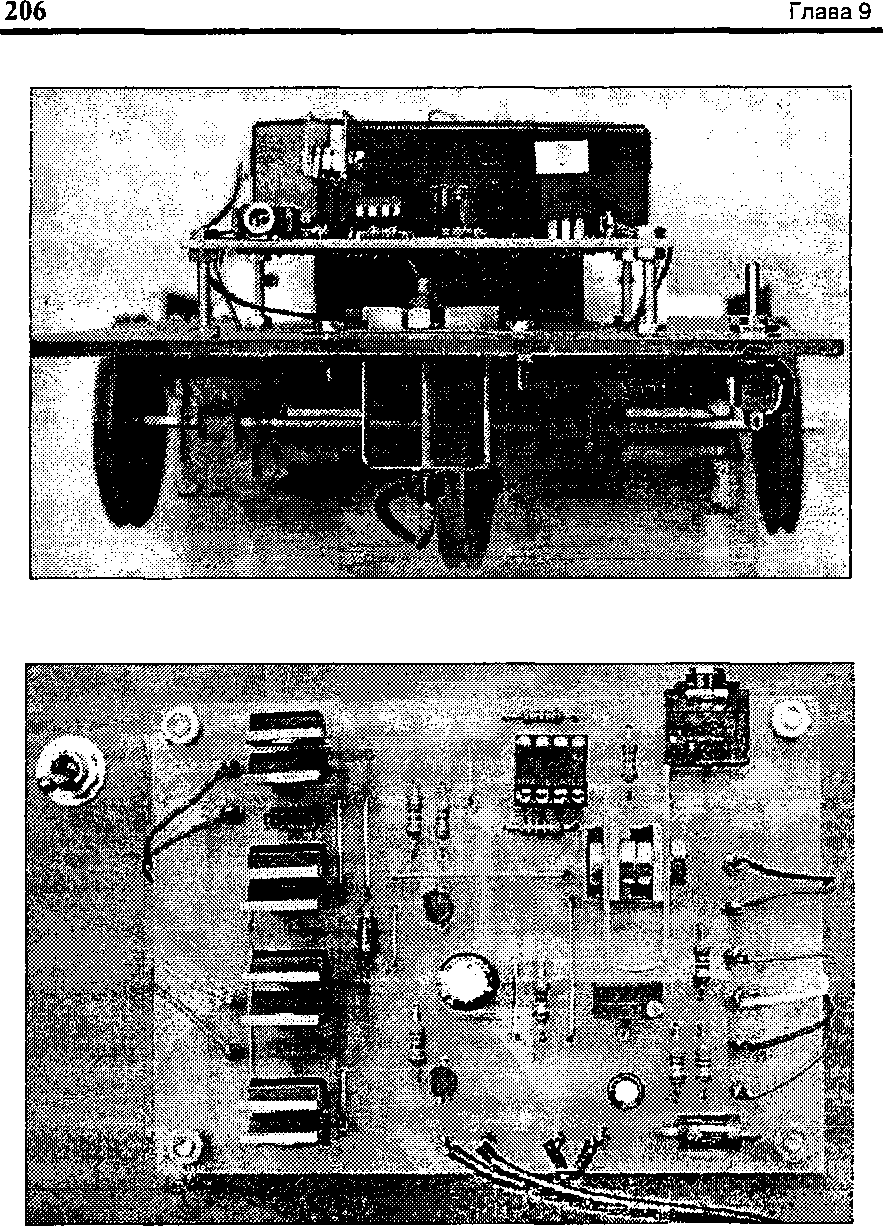
Рис. 9.1. Продолжение
Робот "Охотник за светом"
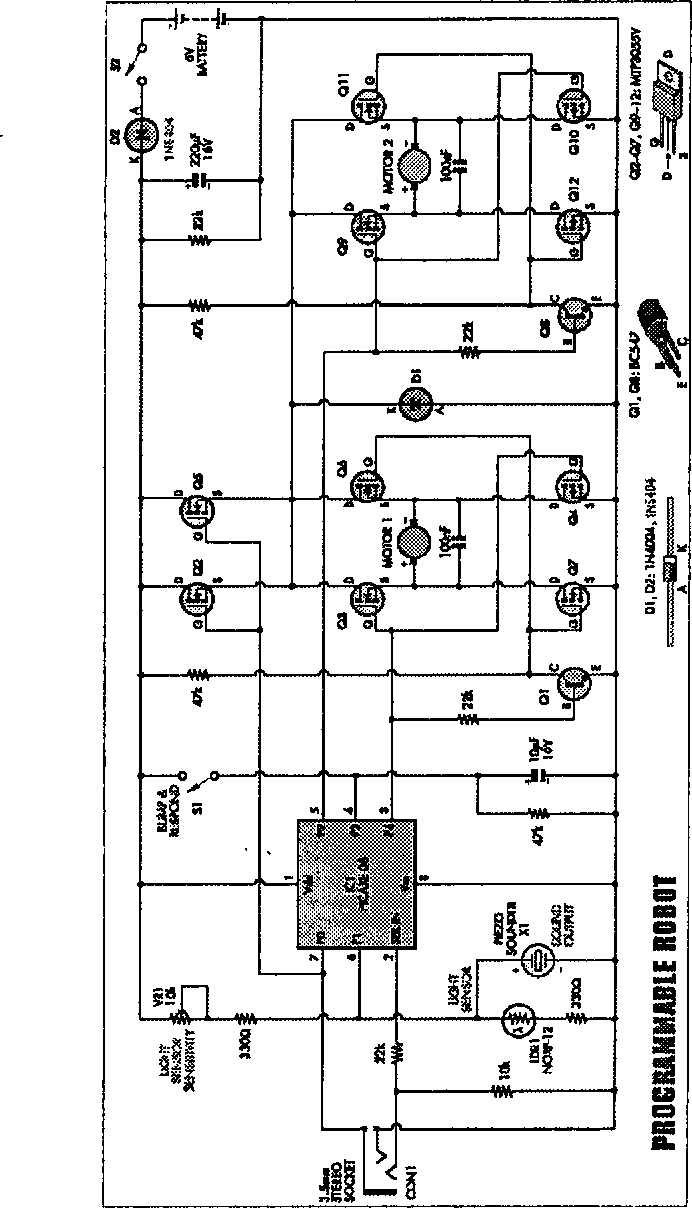
Рис. 9.1. Окончание
208
Глаза 9
Иностранные разработчики взяли за основу простой микроконтроллер с небольшим количеством выводов. Эта тенденция обретает у радиолюбителей все большую популярность. Простота монтажа, эффективность использования ресурса микроконтроллера, простота программирования, решение поставленной задачи путем разбиения на отдельные небольшие фрагменты, дешевизна — все эти качества в высшей мере востребованы. Соединение воедино систем управления шинами CAN, ГС и ISP позволяет собрать отдельные фрагменты в комплекс, сделать решение поставленной задачи "прозрачным", независимым и универсальным.
Для того чтобы понять, как создать РОС, определим, какие требования необходимо рассмотреть во время конструирования робота. Робот двигается в сторону более яркого света, он оснащен двумя фотодатчиками, двумя контактными датчиками препятствия и двумя маломощными двигателями, а также — собственным автономным источником питания. Для облегчения конструкции РОС выполнен из легких, прочных материалов.
| НА ГЛАВНУЮ | | ЧТО ТАКОЕ PIC ? | | ПРОГРАММАТОР | | ПРОЕКТЫ | | СТАТЬИ | | ССЫЛКИ | | КАРТА САЙТА |